Cum se comportă sedanul Lexus GS F pe liniile drepte spaniole și pe pista de curse Jarama. Mitsubishi Outlander "Dream Road" Ce este tracțiunea vectorială
- Tracţiune pe patru roţi? Oh, nu, această decizie nu este pentru noi. Un diferențial TVD activ pentru vectorizarea de tracțiune este tot ce avem nevoie.
Dar Yukihiko Yaguchi, creatorul tuturor Lexus-urilor cu litera „F”, are dreptate. Pentru că noua sa creație, sedanul greoi și puternic (477 CP!) Lexus GS F, este uimitor nu numai pe autostrăzile spaniole. Dar și pe circuitul de curse spaniol „plug” din Jarama!
P De ce Lexus, cu tenacitate japoneză, cultivă marca sport „F” prin analogie cu AMG-ul Mercedes sau „M” de la BMW? Primul F-Lexus, sedanul IS F al modelului 2007, nu a câștigat niciun laur: în șapte ani, au fost vândute doar 12 mii de sedanuri - aceasta este mai puțin decât primul-născut BMW M3 seria E30 din anii optzeci, ca să nu mai vorbim de tirajul a 66 de mii „Emoke” seria E92 în două miimi.
De mult timp, „casa de marcat” a lui Lexus pe piața sa principală, America, nu a fost făcută de sedan, ci de crossover-uri RX. Imaginea este creată de hibrizi. Atunci de ce litera „F” și frumoasa legendă că vine de la numele pistei Fuji Speedway, unde sunt conduse acum toate Lexus-urile „încărcate”?
Pasagerii primesc o atmosferă sportivă din Alcantara și inserții din fibră de carbon (care pot fi fie lucioase, fie texturate), iar șoferul primește un volan plin, pedale metalice și instrumente F în stilul supercarului Lexus LFA.
Pentru că vreau. Japonezii s-au străduit de mult să nu fie în niciun fel inferiori giganților germani. Și nu exclud că în urmă cu trei sau patru ani, o întâlnire F la sediul Lexus s-ar fi putut încheia cu următorul rezumat: din moment ce lucrurile nu au mers cu un sedan mai mic, apoi cu un coupe și un cu patru uși mai mare. ar trebui să iasă.
După restilizarea în această vară, GS a devenit sălbatic și a arborat faruri duble RC cu bumerang, așa că sedanul „încărcat” diferă de RC F cu două uși doar prin absența unui orificiu de ventilație pe capota din aluminiu. Aceleași mandibule puternice ale barei de protecție, unde sunt ascunse radiatoarele de ulei de motor, aceleași branhii pe aripile față.

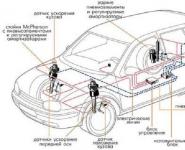
Orificiile mari de-a lungul marginilor barei de protecție din față sunt destinate radiatoarelor de ulei. Iar găurile mici din colțurile inferioare ale grilei false ale radiatorului sunt canale de aer pentru răcirea frânelor

Un mic spoiler din fibră de carbon, deși ușor, reduce portanța, reducând turbulențele din spatele pupei

În spate, GS F se distinge cel mai ușor prin pseudodifuzorul și țevile de evacuare duble dispuse într-un trapez.
0 / 0
Stai într-o găleată confortabilă cu găuri decorative la grătar (se presupune că pentru centurile de siguranță în patru puncte) cu demnitate. Nu este nevoie să cazi, nu trebuie să te strângi. Instrumentele cu un turometru puternic de la coupe-ul RC F și panoul frontal semiacoperit în Alcantara cu capetele șuruburilor de montaj expuse dau o ambianță de curse. Spatele este încă spațios, dar portbagajul s-a micșorat cu doar 10 litri - pierzând totuși o nișă adâncă pentru o anvelopă de rezervă de dimensiune completă.

În funcție de modul de funcționare selectat al motorului și al transmisiei, câmpul de informații se modifică. Eco oferă doar o idee despre viteză (vitezometrul cu cadran mic este la fel de incomod ca cel al unui Porsche 911). Echilibrul optim între cantitatea de informații și viteza de percepere a acesteia se realizează în modurile Normal și Sport. Dar Sport+ este deja prea mult: duplicarea indicatoarelor de temperatură a uleiului și a lichidului de răcire este inutilă. Apropo, numărul vitezei curente nu este afișat în niciunul dintre moduri, cu excepția cazului în care apăsați selectorul de la Drive la „buton”
Din punct de vedere tehnic, Lexus GS F este atât o modificare sport a sedanului original, cât și o versiune extinsă cu patru uși a coupe-ului RC F. Caroseria este întărită cu bretele sub partea inferioară. Și toată umplerea este de la două uși „încărcate”: au în comun nu numai modulul frontal cu subcadru din aluminiu al brațului dublu din față, ci și suspensia spate cu cinci brațe, unde un braț superior și rulmentul roții susțin. sunt realizate din metal „înaripat”.
Sub capotă se află combinația veche a unui motor V8 cu aspirație naturală de 477 CP, cunoscut de la RC F. și o transmisie automată cu opt trepte cu convertor de cuplu. Dar acesta din urmă nu limitează turația maximă a motorului? La urma urmei, acesta este motivul pentru care Mercedes-AMG folosește un ambreiaj umed în transmisia sa automată Speedshift MCT, iar BMW schimbă complet mecanica hidraulică „civilă” cu una M-preselectivă. Și nu este mai ușor să obțineți puterea necesară cu turboalimentare, fără de care nu numai Audi RS 6 Avant, ci și BMW M și Mercedes-AMG sunt deja de neconceput? La urma urmei, Lexus GS F, chiar fiind mai ușor cu 60-80 kg, le este inferior cu 90-93 CP. - și este cu 0,3-0,9 s în urmă în accelerație la „sute”, arătând cele mai proaste 4,6 s din clasă.

Spre deosebire de scaunele multicontur de la Audi, BMW și Mercedes, cupa de lux ventilată Lexus nu are reglare pentru lățimea suportului lateral și înălțimea suportului lombar.

GS F este spațios, dar auster, ca un GS obișnuit cu pachetul F Sport: fără climatizare în trei zone, fără reglaje electrice pentru scaunele din spate. Singurul articol de lux rămas este jaluzelul electric al lunetei.

Roțile forjate BBS de 19 inchi poartă anvelope Michelin Pilot Super Sport, ca cele de pe BMW M5. Monoblocuri Brembo - față cu șase pistoane și spate cu patru pistoane
0 / 0
La astfel de reproșuri, Yaguchi-san răspunde că secundele și „caii” nu sunt nimic. Principalul lucru, spun ei, este filozofia F specificată pentru sedan: răspuns, sunet și senzație de putere fără limită - „răspuns, sunet și un sentiment nesfârșit de putere”. Rețineți, sentimentul de putere, nu de putere ca atare! Răspunsul este impecabil - GS F urmează pedala dreaptă ca o pisică, încet și rapid. Iar baritonul catifelat al lui V8, transformându-se într-o mezzo-soprano la viteze mari, creează infinitul promis al sentimentului de putere. Trebuie doar să dezactivați vocea falsă a sintetizatorului Active Sound Control, care simulează zgomotul de admisie și alte sunete din compartimentul motorului în difuzorul frontal și basul sistemului de evacuare în difuzorul din spate.
Nu puteți învinovăți transmisia automată adaptivă pentru că este lentă pe un drum de munte – sau chiar pe o pistă. Pe lângă modurile Sport și chiar mai agresive Sport+, recunoașterea terenului familiară de la BMW și Audi folosind navigatorul este „conectată” la acesta: Lexus nu se va deplasa „în sus” pe un arc fără a atinge viteza maximă. Iar decelerația puternică va forța „automatul” să împingă în mod activ treptele inferioare.
Și totul ar fi bine. Dar când trebuie doar să accelerezi pentru a depăși un camion, există o întârziere de o secundă și jumătate! Pentru că algoritmii noi nu funcționează pe o linie dreaptă fără încetiniri bruște.

Setările diferențiale active trebuie selectate cu un buton TVD separat, iar modurile de funcționare ale unității de alimentare, amplificatorului electric și sistemului de stabilizare trebuie selectate cu un „puck”. Mai mult decât atât, doar automatul va înviora Sportul: dacă vrei să te distrezi de minune, apasă imediat pe Sport+

Japonezii susțin că sistemul de infotainment a fost modernizat în timpul restyling-ului. Deși grafica rămâne urâtă, sunetul clicurilor este amuzant și trebuie să controlezi toate acestea cu același „mouse” incomod Remote Touch, și nu cu un touchpad, ca în coupe-ul RC
0 / 0
Din fericire 477 CP. rezolva orice probleme. Și pentru cei care au îndoieli, frânele Brembo „moarte” împrumutate de la coupe-ul RC F vor ajuta. Adevărat, pe pistă merită să ne amintim că sedanul este încă cu 100 kg mai greu decât cel cu două uși și trei ture agresive este maximul. Deși, cel mai probabil, automatul se va supraîncălzi înainte de frânare.
Șasiul sedanului este identic cu cel coupe. Servodirecția electrică este, de asemenea, fără mecanismul VGRS, care variază raportul de transmisie. Fără direcție completă, atât de populară chiar și printre specialiștii Porsche și disponibilă ca opțiune pe coupe-ul RC obișnuit. Mai mult, chiar și amortizoarele ZF Sachs sunt „pasive”! Acest lucru se datorează faptului că Yaguchi-san este un susținător al „vechii școli” și preferă acuratețea setărilor corecte decât lărgimea posibilităților.

Șasiul lui GS F este de fapt același cu cel al coupe-ului RC F (foto): subcadru frontal dublu braț este realizat din metal „înaripat” în loc de oțelul unui sedan obișnuit. Aluminiul este, de asemenea, integrat mai larg în partea din spate cu cinci brațe: suporturile rulmenților roții și unul dintre brațele superioare sunt fabricate din acesta. Amortizoare F ZF Sachs - „pasive”, fără fluid magnetoreologic, ca pe sedanul „civil” GS 350 AWD

Corpul lui GS F este întărit cu până la patru bretele pe partea inferioară. Cu toate acestea, japonezii au decis să economisească bani pe „bretele” din aluminiu dintre „ochelarii” stâlpilor A care se află pe coupe.
0 / 0
Datorită faptului că ampatamentul lui GS F este cu 120 mm mai mare decât cel al celor cu două uși și că anvelopele sale din spate sunt cu 20 mm mai largi, este mai stabil și mai precis pe curbele plate de mare viteză. Aș face doar efortul de pe volan mai puternic: nu este atât de natural și de bogat. Ei bine, fleacurile de drum, transmise fidel de cauciucuri cu profil redus, sunt enervante. Dar, în general, suspensia, dacă este mai rigidă decât cea a unui G-S obișnuit cu pachetul F Sport, nu este cu mult: arcuri de calibru mediu și amortizoare înghită gropile cu încredere.
Și în general, sedanul menține un echilibru mai precis între sportivitate și confort. Chiar și în „agrafele” lente de la Harama, dacă greul GS F chiar a sugerat o derivă, atunci într-o fracțiune de secundă a fost înlocuit cu o alunecare uniformă a patru roți. Magie, vrăjitorie?
„Suntem convinși că diferențialul TVD permite șoferului să controleze mai fiabil traiectoria decât un „auto-blocare” convențional, explică domnul Yaguchi acest miracol.

V8 2UR-GSE cu aspirație naturală cu injecție combinată a fost împrumutat pentru modelele F de la pilotul LS 600h încă din 2007. În urmă cu opt ani, i s-a dat un caracter F cu o nouă galerie de admisie, supape de titan, arbori cu came goale și o formă diferită a camerei de ardere. Și de anul trecut, noul „software”, bielele forjate ușoare și un sistem de evacuare mai „liber” au făcut posibilă creșterea puterii și a vitezei: 477 CP. la 7100 rpm în loc de precedentul 423 CP. la 6600 rpm. În plus, schimbătoarele de fază electromecanice în loc de cele hidraulice ajută acum la simularea ciclului Atkinson la sarcini parțiale: supapele de admisie se închid cu 30° mai târziu decât la accelerația maximă, ceea ce reduce consumul de combustibil

Pachetele de ambreiaj cu mai multe plăci și cutii de viteze planetare flanchează transmisia finală, capabile să varieze individual cuplul introdus și viteza unghiulară a fiecăreia dintre roțile din spate - diferenţialul spate activ TVD este identic cu cel utilizat pe coupe-ul RC F. Unitatea este fabricată de GKN - din 2008 instalat pe BMW X6. Prin analogie cu coupe-ul, sedanul GS F are trei presetări: Standard, Slalom și Track. În slalom, sedanul se rotește mai activ atât sub tracțiune în mijlocul arcului, cât și sub eliberarea gazului la intrarea în viraj. Și Track vă permite să accelerați mai puternic în viraj datorită unei mai bune stabilități
0 / 0
TVD, Torque Vectoring Differential, este un diferențial activ cu vectorizare controlată de tracțiune. Nu japoneză, ceea ce este tipic: ideea, născută pe Insule și întruchipată de Mitsubishi și Honda în urmă cu 20 de ani, este acum căutată în Germania - Lexus folosește aceeași unitate GKN ca și BMW. Dar dacă bavarezii îl instalează pe vehiculele X6 cu tracțiune integrală, atunci japonezii îl instalează doar pe mașinile „încărcate” cu tracțiune spate. Mai mult, GS F are deja TVD „în baza de date”.
Nu există încă prețuri exacte. În SUA, unde vânzările vor începe în decembrie, GS F poate fi cu doar una până la două mii de dolari mai scump decât coupe-ul RC F. Aceasta înseamnă că în Rusia, unde o mașină cu două uși este evaluată la 4,9 milioane de ruble, un sedan ar putea costa aproximativ cinci milioane. Cererea, deși mică, va fi acolo: BMW M5 este cu jumătate de milion mai scump, iar Mercedes-Benz E 63 AMG este cu peste un milion mai scump. Apropo, din cele 53 de coupe-uri RC vândute din martie până în septembrie, un sfert au fost RC F.

Pentru sistemul Active Sound Control (ASC) sunt instalate difuzoare separate. Banda largă din față este concepută pentru a imita zgomotul din compartimentul motorului, iar „subwooferul” de joasă frecvență din spate este proiectat pentru a simula sunetul evacuarii

Un nou cuvânt japonez în controlul automat: G-AI Control. G este accelerația, dar AI (Inteligenta Artificială) este inteligența artificială. Ideea este simplă: cutia de viteze coboară în mod activ în timpul decelerării puternice și nu trece în sus la viraj.
0 / 0
Dar problema este că GS F este o ediție limitată exclusivă. Și în lumina implementării obligatorii a sistemului ERA-GLONASS (AR nr. 19, 2015), chiar și Lexus, căruia nu îi pasă de criză datorită succesului răsunător al crossover-ului NX, se îndoiește acum de fezabilitatea economică a certificării și lansa piata ruseasca modele de nișă. Deci inversarea vectorului F-thrust și soarta modelului GS F vor fi determinate mai probabil de manevrele cu sistemul ERA-GLONASS decât de calculele marketerilor.
Și nu numai Lexus! Viitorul rusesc al concurentului său direct, sedanul Cadillac CTS-V de 640 de cai putere, este de asemenea pus sub semnul întrebării. Cât de fierbinte este un Caddy și este cu atât mai bun decât un Lexus, cu atât este mai puternic? Voi afla asta peste două săptămâni în Germania.

| Detalii pașaport | ||
|---|---|---|
| Auto | Lexus GS F | |
| Corp | sedan cu 4 usi | |
| Numărul de locuri | 5 | |
| Dimensiuni, mm | lungime | 4915 |
| lăţime | 1845 | |
| înălţime | 1440 | |
| ampatamentul | 2850 | |
| calea fata/spate | 1555/1560 | |
| Volumul portbagajului, l | 520 | |
| Greutate proprie, kg | 1790 | |
| Greutate totală, kg | 2320 | |
| Garda la sol, mm | 130 | |
| Motor | benzina, injectie directa | |
| Locație | frontal, longitudinal | |
| Numărul și dispunerea cilindrilor | 8, în formă de V | |
| Volumul de lucru, cm 3 | 4969 | |
| Rata compresiei | 12,3:1 | |
| Numărul de supape | 32 | |
| Max. putere, CP/kW/rpm | 477/351/7100 | |
| Max. cuplu, Nm/rpm | 530/4800—5600 | |
| Transmitere | automat, cu 8 trepte | |
| Unitatea de antrenare | la rotile din spate | |
| Suspensie fata | independent, arc, braț dublu | |
| Suspensie spate | independent, arc, multi-link | |
| Frane fata | disc, ventilat | |
| Frâne spate | disc, ventilat | |
| Cauciucuri fata | 255/35 R19 | |
| Cauciucuri din spate | 275/35 R19 | |
| Viteza maxima, km/h | 270 | |
| Timp de accelerație 0—100 km/h, s | 4,6 | |
| Consum de combustibil, l/100 km | ciclu urban | 16,6 |
| ciclu suburban | 8,1 | |
| ciclu mixt | 11,2 | |
| Emisii de CO 2, g/km | 260 | |
| Capacitate rezervor combustibil, l | 66 | |
| Combustibil | AI-98 | |

Ecuație diferențială
Cum funcționează sistemul de control al vectorului de tracțiune?
Ecuație diferențială
Cum funcționează sistemul de control al vectorului de tracțiune?
Pavel Mikhailov, publicat pe 02 mai 2017
Foto: Firme producătoare
Există un diferențial în orice mașină, dar de ce este necesar? Ce este un „diferențial activ” cu funcție de vectorizare a cuplului - și de ce ajută la viraj? Să aflăm!
Când conduceți, toate roțile unei mașini se rotesc cu viteze diferite. Fie doar pentru că drumul este denivelat și dacă una dintre roți lovește o denivelare, atunci parcurge o distanță mai mare decât toate celelalte care circulă pe un drum plat. Dar la întoarcere, totul este cu adevărat rău: fiecare dintre cele patru roți se deplasează pe propria rază (atenție la urmele lăsate de mașini în zăpadă).
Și dacă aceasta nu este o problemă pentru roțile care nu sunt motrice, atunci cu roțile motrice totul nu este atât de simplu. Când două roți motrice sunt conectate printr-un arbore rigid, anvelopele vor aluneca sau aluneca în mod constant, ceea ce înseamnă că se vor uza rapid. În același timp, consumul de combustibil va crește, iar mașina se va descurca mai rău. Pentru a evita aceste probleme, mașinile sunt echipate cu diferențiale.
Inventatorul diferenţialului este considerat a fi matematicianul francez Onesiphore Peccoeur, iar evenimentul în sine datează din 1825. Deși, potrivit unor surse, un dispozitiv similar a existat în Roma Antică, să lăsăm problema istoriei în seama specialiștilor. În acest articol vom acorda mai multă atenție unui sistem relativ tânăr cunoscut sub numele de torque vectoring, care tradus din engleză înseamnă „controlul vectorului de tracțiune”.
În primul rând, merită să înțelegeți cum funcționează un diferențial în general. Este alcătuit din patru elemente principale: carcasa, sateliții, axa satelitului și angrenajele osiilor. Principiul funcționării sale este simplu: carcasa diferențialului este conectată rigid la angrenajul antrenat al angrenajului principal, axa sateliților este conectată rigid la carcasă. Cuplul este transmis corpului, de la acesta către axa sateliților și, în consecință, către sateliții înșiși - și ei, la rândul lor, transmit forță către angrenajele arborilor de osie.

Amintește-ți cum, în copilărie, ai echilibrat un prieten de aceeași construcție pe un leagăn - puteai să stai în aer fără să atingi pământul. Într-un diferențial, angrenajele arborelui axului sunt aceleași, astfel încât brațul de forță pentru arborii axei din stânga și din dreapta este, de asemenea, același, ceea ce înseamnă că cuplul pe roțile din stânga și din dreapta este același.
Diferenţialul permite roţilor să se învârtească în direcţii diferite una faţă de alta. Încercați să rotiți o roată motrice a ascensorului - a doua se va roti în direcția opusă. Cu toate acestea, în raport cu mașina, aceste roți se rotesc într-o singură direcție - la urma urmei, carcasa diferențialului se rotește și el! Este ca și cum ai merge cu spatele într-un autobuz și tot te-ai îndepărta de persoana care rămâne la oprire. Deci, se dovedește că cele două roți se rotesc cu aceeași forță și au capacitatea de a face acest lucru la viteze diferite. Acest lucru este prezentat cât se poate de clar în videoclip:
Acest design are un dezavantaj: ambele roți primesc același cuplu și, pentru a face mașina să se rotească mai bine, ar fi bine să furnizați mai mult cuplu roții exterioare. Apoi, atunci când apăsați pe accelerație, mașina se va învârti literalmente în viraj - iar efectul va fi mult mai pronunțat decât pe o mașină cu tracțiune cu o singură axă și diferențial liber. Dar cum să implementezi un astfel de sistem într-un design real?
Astăzi, astfel de sisteme devin din ce în ce mai populare. Sintagma „torque vectoring” în sine a fost auzită pentru prima dată în 2006, dar un sistem similar, numit Active yaw control, a apărut pe pistele de raliu în anii 90: a fost echipat cu Mitsubishi Lancer Evolution IV, care a debutat în 1996. Dar înainte de a ne uita în detaliu la designul unui diferențial cu drepturi depline cu un sistem de vectorizare a cuplului, să aruncăm mai întâi o privire la analogul simplificat utilizat în Ford Focus RS. Un sistem similar este utilizat în transmisia Land Rover Discovery Sport și Cadillac XT5.
Sistemul este destul de simplu – este chiar puțin mai simplu decât tracțiunea integrală tradițională, deoarece nu are diferențial spate. Există doar două cuplaje, fiecare dintre ele conectând propriul arbore de osie. Când conduceți în linie dreaptă fără alunecare, mașina rămâne cu tracțiunea față, roțile din spate sunt cuplate numai la alunecare și la întoarcere (în viraj la stânga - roata spate dreapta și invers). Roata poate primi până la 100% din cuplul care ajunge la puntea spate, astfel sistemul compensează subvirarea rezultată, ca și cum ar fi întors mașina.
Dar dacă există o singură punte motoare și, în modurile silențioase, este necesar un diferențial și unul deschis, dar într-o viraj doriți să furnizați mai mult cuplu roții exterioare pentru a controla mai eficient mașina cu gaz , și, de asemenea, reduce subvirarea?
Astfel de soluții există și în industria auto modernă. De exemplu, cea mai recentă generație Lexus RC F și GS F sunt echipate cu un diferențial spate care poate distribui cuplul între roțile din stânga și din dreapta. Într-o astfel de unitate din cutia de viteze din spate, angrenajul principal rotește carcasa celui mai obișnuit diferențial; există, de asemenea, două angrenaje planetare cu supramulțumire, care, cu ajutorul unui pachet de ambreiaj, pot conecta carcasa diferențialului la arborele osiei. Astfel, un cuplu suplimentar este furnizat roții exterioare printr-un angrenaj planetar, datorită căruia are loc efectul de înșurubare într-o tură.
O soluție similară a fost aplicată la puntea din spate a BMW X6 M și X5 M cu tracțiune integrală - atât pentru BMW, cât și pentru Lexus, iar pentru Cadillac și Land Rover, sistemul a fost dezvoltat și fabricat de GKN. Diferența, în mare, este doar în carcasa finală: de exemplu, BMW o are din aluminiu, în timp ce Lexus o are din fontă. Acționarea ambreiajelor de frecare de la ambii producători este mecanică, este realizată de ambreiaje GKN identice.
Mașinile Audi cu diferențial sport opțional au și ele un sistem similar, dar aici nu există angrenaje planetare, ci roți dințate interne simple. Dar principiul de funcționare este absolut același: folosind un pachet de ambreiaj, două viteze sunt conectate, iar arborele osiei este conectat la carcasa diferenţialului printr-un overdrive. Pentru o înțelegere mai completă, puteți viziona acest videoclip:
Cât de mare este efectul utilizării diferenţialelor avansate? Revista americană Car and Driver a efectuat un test comparativ cu două modele Lexus RC F, dintre care unul era echipat cu un sistem diferențial de vectorizare a cuplului, iar al doilea cu un „autoblocare” convențional. Ca urmare a accelerațiilor maxime mai mari, a unghiurilor de virare mai mici și a timpilor pe tur mai buni pentru mașina cu diferențial activ, caracterul mașinii s-a schimbat spre supravirare. Și mă bucur că este disponibil nu numai pentru mașinile sport, ci și pentru crossover-ul compact Nissan Juke - deși într-o versiune oarecum simplificată.
Deocamdată, nu vă așteptați ca astfel de sisteme să înlocuiască diferențele tradiționale - la urma urmei, sunt mai complexe, mai scumpe și mai necesare șoferilor activi. Cu toate acestea, odată cu apariția erei vehiculelor electrice, vor apărea cele mai largi oportunități de control al vectorului de tracțiune: la urma urmei, dacă fiecare roată motoare are propriul motor electric, atunci implementarea efectului de vectorizare a cuplului va fi doar o chestiune de software. .
Un diferențial activ sună tentant, de înaltă tehnologie și ceva pe care veți dori să cumpărați atunci când cumpărați un crossover sau un SUV, dar ce este exact, ce face și este cu adevărat necesar? Aceste cele mai importante întrebări vor fi explorate într-un test comparativ al SUV-urilor Mitsubishi Outlander cu două transmisii diferite: cu un diferențial convențional și cu noul diferențial activ S-AWC.
Pentru o analiză comparativă a performanței în diferite condiții, au fost luate două mașini Mitsubishi Outlander complet identice, singura diferență fiind că unul Outlander are instalat în față un diferențial deschis tradițional, iar celălalt are un sistem diferențial activ S-AWC, care a fost instalat pe aceste vehicule din toamna anului 2014. crossover echipate cu un motor pe benzină de 3 litri cu șase cilindri.
S-AWC este un sistem inteligent de tracțiune integrală dezvoltat de Mitsubishi. Este o abreviere a expresiei „ Super All Wheel Control”, care poate fi tradus ca „Super-level control al tuturor roților”.
Sistemul S-AWC este instalat pe mașini în configurația „Sport”, care este cu 20.000 de ruble mai scumpă decât configurația „Altimet”. Aproape toată această sumă este costul diferenţialului activ.
În condiții normale, este foarte dificil să se identifice diferența de comportament a acestor mașini cu diferențiale diferite, deoarece aceasta apare doar atunci când crossover-ul își pierde traiectoria și stabilitatea direcțională, când părăsește arcul la virare sau manevre pe un drum cu un coeficient de aderență inegal (de exemplu, gheață - asfalt).
Outlander ia pe rând
 Primul lucru la rând a fost un test de viraj pe o suprafață obișnuită de asfalt. La începutul acestei teste, se pare că caracteristicile de conducere ale mașinilor sunt aceleași, dar asta este deocamdată - au fost testate la viteze diferite! Așadar, un Mitsubishi Outlander cu diferențial convențional, pornind de la o anumită viteză, și cu cât era mai mare, cu atât se manifesta mai clar modul său de a îndrepta traiectoria de viraj. Adică, cu cât viteza cu care se intră într-un colț este mai mare, cu atât se deviază mai mult spre exterior sub influența forței centrifuge.
Primul lucru la rând a fost un test de viraj pe o suprafață obișnuită de asfalt. La începutul acestei teste, se pare că caracteristicile de conducere ale mașinilor sunt aceleași, dar asta este deocamdată - au fost testate la viteze diferite! Așadar, un Mitsubishi Outlander cu diferențial convențional, pornind de la o anumită viteză, și cu cât era mai mare, cu atât se manifesta mai clar modul său de a îndrepta traiectoria de viraj. Adică, cu cât viteza cu care se intră într-un colț este mai mare, cu atât se deviază mai mult spre exterior sub influența forței centrifuge.
Forța centrifugă este o forță fictivă care apare din cauza inerției unui corp într-un cadru de referință rotativ. Corpul tinde să se miște drept, prin urmare, atunci când este „întors” spre centru, tinde să „depărteze” de acest centru.
Mai mult, acest simptom nu depinde de dacă crossover-ul se mișcă fără tracțiune sau cu pedala de accelerație apăsată. „Outlander” cu un S-AWC diferenţial activ urmează o cale dată mult mai binevoitor. Subvirarea care a fost pronunțată la Outlander obișnuit s-a schimbat în neutru: acum crossover-ul începe să alunece ușor în lateral, dar cu toate cele patru roți. În același timp, menține stabilitatea atât a traiectoriei, cât și a direcției. De fapt, acest lucru se va manifesta printr-o mai bună păstrare a traiectoriei de mișcare pe măsură ce viteza crește la viraj, ceea ce înseamnă că șoferul va avea șanse mai mari să rămână pe banda sa decât să zboare pe banda din sens opus sau într-un șanț.
Trebuie remarcat faptul că ambele crossover-uri diferă și în setările electronicii de stabilizare. Modelul fără S-AWC întrerupe pur și simplu alimentarea cu combustibil dacă există o pierdere bruscă a tracțiunii, împiedicând astfel vehiculul să ajusteze traiectoria vehiculului folosind tracțiune. În același timp, Outlander, echipat cu sistemul de diferențial activ S-AWC, nu înlătură complet cuplul motorului, ci doar îl limitează. Și totuși, s-a observat că comportamentul mașinilor este diferit atunci când se deplasează pe coasta. În acest caz, diferenţialul activ nu este cuplat (adică nu se transmite nicio tracţiune roţilor din faţă). Astfel, este evident că noua versiune a primit îmbunătățiri cuprinzătoare, și nu doar o parte nouă.
Mișcare circulară
Una dintre etapele identificării diferențelor dintre „Outlanders” a fost deplasarea într-un cerc cu un diametru de 30 de metri, marcat cu stâlpi. Într-un Mitsubishi Outlander obișnuit, echipat cu tracțiune integrală controlată electronic, există un comutator pentru trei moduri de funcționare: tracțiune integrală cu distribuție inteligentă a tracțiunii între axe (4WD Auto), tracțiune integrală cu ambreiaj blocat (4WD) Blocare) și tracțiune față cu puntea spate conectată (4WD Eco). Comutatorul este marcat cu desemnarea standard 4WD. Vehiculele echipate cu transmisie S-AWC au adăugat un al patrulea mod numit Snow, care asigură electronic tracțiune optimă pe toate roțile pe suprafețe alunecoase.
 La circulația în cerc, viteza medie în ambele variante a rămas la aproximativ 50 km/h. Am verificat mișcarea în direcții diferite, cu presiune diferită pe pedala de accelerație, cu stări diferite ale sistemului de stabilizare. Drept urmare, Outlanderul „activ” s-a dovedit constant a fi puțin mai rapid - cu o fracțiune de secundă, dar dacă opriți sistemul de stabilizare, intervalul de timp crește. Da, decalajul este mic, dar șoferul care stă la volanul modelelor testate trăiește cu totul alte senzații. Când conduceți un Outlander obișnuit, trebuie să setați volanul la unghiul de virare necesar, să apăsați accelerația și să nu acționați volanul. Ei se întorceau la traiectoria anterioară; atunci când avea loc o derapare la o viraj, doar încetinirea a ajutat, iar acțiunile de la volan nu duceau la nimic. Iar sistemul de stabilizare nu a permis creșterea vitezei. Senzații complet diferite au apărut la conducerea unui crossover cu un diferențial activ, care a returnat sentimentul de control real al unei mașini și nu al unui robot de joc - un simulator. Aici, când are loc o derapare sau o premoniție a apariției sale, trebuie doar să rotiți volanul la gradul necesar, să apăsați puțin pedala de accelerație și asta este - mașina este deja pe traiectoria sa! Astfel, Outlander cu transmisie activă S-AWC devine mai sigur și mai previzibil pentru condus.
La circulația în cerc, viteza medie în ambele variante a rămas la aproximativ 50 km/h. Am verificat mișcarea în direcții diferite, cu presiune diferită pe pedala de accelerație, cu stări diferite ale sistemului de stabilizare. Drept urmare, Outlanderul „activ” s-a dovedit constant a fi puțin mai rapid - cu o fracțiune de secundă, dar dacă opriți sistemul de stabilizare, intervalul de timp crește. Da, decalajul este mic, dar șoferul care stă la volanul modelelor testate trăiește cu totul alte senzații. Când conduceți un Outlander obișnuit, trebuie să setați volanul la unghiul de virare necesar, să apăsați accelerația și să nu acționați volanul. Ei se întorceau la traiectoria anterioară; atunci când avea loc o derapare la o viraj, doar încetinirea a ajutat, iar acțiunile de la volan nu duceau la nimic. Iar sistemul de stabilizare nu a permis creșterea vitezei. Senzații complet diferite au apărut la conducerea unui crossover cu un diferențial activ, care a returnat sentimentul de control real al unei mașini și nu al unui robot de joc - un simulator. Aici, când are loc o derapare sau o premoniție a apariției sale, trebuie doar să rotiți volanul la gradul necesar, să apăsați puțin pedala de accelerație și asta este - mașina este deja pe traiectoria sa! Astfel, Outlander cu transmisie activă S-AWC devine mai sigur și mai previzibil pentru condus.
Alunecare pe bazalt
Coeficientul de aderență a roților cu bazalt umed este aproximativ același ca și cu gheața, iar în astfel de condiții modelele Mitsubishi Outlander testate au prezentat diferențe semnificative în comportamentul lor. Mitsubishi „activ”, atunci când conduce ca un șarpe, permite o ușoară balansare și este mai susceptibil la derapaj.
Derapajul este o încălcare a direcției de mișcare a unui vehicul de-a lungul planului longitudinal.
Dar acest lucru nu este înfricoșător, pentru că, dacă se întâmplă ceva, electronica va interveni: atunci când se apropie de viraje aproape de critice, oprește tracțiunea și preia parțial controlul, ceea ce face ca conducerea unui astfel de crossover să fie mai interesantă și în același timp mai sigură.
 La accelerarea de la oprire pe aceeași suprafață, Outlander-ul cu diferențial activ a fost din nou în față - a pornit mai încrezător, cu o alunecare mai mică a roților, în timp ce crossover-ul cu diferențial convențional intenționa să meargă în lateral, dar sistemul de stabilizare a corectat imediat acest lucru. . Nu exista nicio diferență de mișcare atunci când întreaga mașină sau orice parte a acesteia se afla pe o suprafață alunecoasă.
La accelerarea de la oprire pe aceeași suprafață, Outlander-ul cu diferențial activ a fost din nou în față - a pornit mai încrezător, cu o alunecare mai mică a roților, în timp ce crossover-ul cu diferențial convențional intenționa să meargă în lateral, dar sistemul de stabilizare a corectat imediat acest lucru. . Nu exista nicio diferență de mișcare atunci când întreaga mașină sau orice parte a acesteia se afla pe o suprafață alunecoasă.
Pentru ce este S-AWC?
Testul Mitsubishi Outlander este echipat cu un motor destul de puternic care dezvolta 230 CP, dar nu poate fi considerat un crossover sport si nici macar diferentialul activ instalat intr-unul dintre ele nu adauga efectiv viteza. Transmisia S-AWC oferă câștiguri pe pistă doar într-o fracțiune de secundă, astfel încât scopul său principal este creșterea siguranței active, care se manifestă nu numai la conducerea sub tracțiune, ci și la eliberarea bruscă a gazului. Un diferențial activ poate ajuta, de asemenea, atunci când conduceți în teren - în acest caz, șoferul are o blocare frontală controlată electronic. Dar acesta nu este încă un SUV, iar în condiții off-road grave, diferențialul activ nu va ajuta - cel mai probabil, cuplajul inter-ax se va supraîncălzi și s-ar putea să nu vină în ajutorul unui design inteligent.
 În sport și în timpul conducerii de zi cu zi, un diferențial activ îndeplinește diferite sarcini: șoferul dezvoltă o viteză mai mare, iar șoferul obișnuit primește o siguranță mai mare a mașinii, deoarece tendința de derapare a mașinii este redusă. Și, în același timp, într-o situație dificilă, un diferențial activ permite unei persoane care nu are abilități profunde de conducere să evite multe greșeli. Pentru profesioniști, poate că o mașină cu diferențial convențional va fi și mai interesantă din punct de vedere al conducerii, deoarece face posibil să rămâneți unul la unul cu mașina fără intervenție electronică.
În sport și în timpul conducerii de zi cu zi, un diferențial activ îndeplinește diferite sarcini: șoferul dezvoltă o viteză mai mare, iar șoferul obișnuit primește o siguranță mai mare a mașinii, deoarece tendința de derapare a mașinii este redusă. Și, în același timp, într-o situație dificilă, un diferențial activ permite unei persoane care nu are abilități profunde de conducere să evite multe greșeli. Pentru profesioniști, poate că o mașină cu diferențial convențional va fi și mai interesantă din punct de vedere al conducerii, deoarece face posibil să rămâneți unul la unul cu mașina fără intervenție electronică.
Deci, merită cu siguranță să plătiți peste 20.000 de ruble pentru un astfel de diferențial activ inteligent, atunci când mașina costă un milion și jumătate!
Schema de funcționare a diferenţialului activ pe Outlander
Principiul de funcționare al diferențialului activ S-AWC se bazează pe implementarea controlului vectorial de tracțiune, dar schema de funcționare a acestuia pe Lancer Evolution și pe Mitsubishi Outlander este semnificativ diferită. Așadar, pe Evolution, diferențialul activ este amplasat pe puntea spate și adaugă tracțiune roții exterioare în raport cu virajul efectuat, eliminând subvirarea. Acest lucru se realizează prin două ambreiaje, fiecare direcționând cuplul către propria sa roată.
Dar modul în care funcționează S-AWC la Outlander este complet diferit, fie și doar pentru că este instalat pe puntea față. Rolul principal este jucat aici de ambreiajul multidisc, care acționează ca un blocaj moale. Pentru a comprima ambreiajele, electronica trimite un semnal de conducere la momentul potrivit, iar o autoblocare mecanică ar acționa cu o ușoară întârziere. Servodirecția electrică activă de pe Mitsubishi testat compensează diferențialul, eliminând direcția bruscă din cauza diferenței de cuplu pe roțile din față dreapta și stânga, ceea ce împiedică smulgerea volanului din mâinile tale. Desigur, orice situație de urgență nu apare fără intervenția sistemului electronic de stabilizare al crossover-ului, care limitează puterea motorului și mecanismele de frânare care apucă roțile.
S-AWC: istoria creației
 Japonezii au fost primii care l-au creat și au introdus acest concept în uz. Așadar, în 1996, Mitsubishi a instalat primul diferențial activ pe puntea spate a lui Lancer Evo IV cu tracțiune integrală, iar în 1997, Honda a instalat un sistem de vectorizare a cuplului pe coupe-ul Prelude cu tracțiune față. Destul de ciudat, nemții, care sunt mereu printre primii care, dacă nu creează, apoi instalează lucruri high-tech, de data aceasta au început să introducă un nou produs abia în 2007 (deși ce produs nou este deja!). Astfel de unități au devenit disponibile opțional pe BMW X6 și Audi S4, dar diferențialul activ a devenit cu adevărat răspândit doar pentru Lancer Evolution. Astăzi putem spune cu încredere că aproximativ jumătate dintre producătorii auto oferă funcția de distribuție a cuplului între roți. Cu toate acestea, nu trebuie să uităm că aceasta nu este o mecanică specială, ci doar o imitație electronică a acesteia.
Japonezii au fost primii care l-au creat și au introdus acest concept în uz. Așadar, în 1996, Mitsubishi a instalat primul diferențial activ pe puntea spate a lui Lancer Evo IV cu tracțiune integrală, iar în 1997, Honda a instalat un sistem de vectorizare a cuplului pe coupe-ul Prelude cu tracțiune față. Destul de ciudat, nemții, care sunt mereu printre primii care, dacă nu creează, apoi instalează lucruri high-tech, de data aceasta au început să introducă un nou produs abia în 2007 (deși ce produs nou este deja!). Astfel de unități au devenit disponibile opțional pe BMW X6 și Audi S4, dar diferențialul activ a devenit cu adevărat răspândit doar pentru Lancer Evolution. Astăzi putem spune cu încredere că aproximativ jumătate dintre producătorii auto oferă funcția de distribuție a cuplului între roți. Cu toate acestea, nu trebuie să uităm că aceasta nu este o mecanică specială, ci doar o imitație electronică a acesteia.
Video Mitsubishi Outlander învinge off-road și zăpadă
Ce este Thrust Vector Control?
Controlul vectorului de tracțiune
Controlul vectorului de tracțiune
deviația curentului cu jet al unui motor cu turboreacție sau jetul format atunci când elicea cu turbopropulsor se rotește din direcția corespunzătoare modului de zbor de croazieră pentru a crea portanță suplimentară, forță de control sau frânare. U.V. t. este utilizat pentru reducerea lungimii alergării și alergării la decolare (SCVP, VTOL), precum și la manevrele în zbor. Deviația curentului jet la U.V. adică se realizează folosind dispozitive de deviere (DE), care sunt elemente structurale ale unui motor sau aeronave. În VTOL U.V. adică se realizează și prin utilizarea motoarelor turboreactor de ridicare sau a ventilatoarelor amplasate în fuzelaj sau aripă, sau atunci când se folosește un motor turborreactor prin rotirea acestora într-un plan vertical.
Amplificatoarele operaționale ale motorului sunt împărțite în două tipuri. Primul include duze sau grile rotative, care îndeplinesc funcțiile unei duze drepte în timpul modului de croazieră și duze plate cu pereți mobili. Amplificatoarele operaționale de al doilea tip au clapete care blochează traseul duzei sau sunt instalate în spatele secțiunii de ieșire a duzei. În acest caz, jetul este deviat direct de clapete. Astfel de amplificatoare operaționale includ un dispozitiv de inversare. Amplificatoarele operaționale (cu excepția dispozitivelor de inversare) au un coeficient de forță -
nu mai mic de 0,94-0,96, unde P este forța creată de amplificatorul operațional, Reed este forța ideală a amplificatorului operațional la același debit de gaz.
În sistemele de operare a aeronavei, devierea curentului de jet al motorului se realizează prin flaps: când jetul este suflat pe clapetă de jos sau când jetul este suflat pe aripă de sus; în acest din urmă caz, se folosește efectul aderenței jetului la suprafață (vezi Mecanizarea energetică a unei aripi).
Aviație: Enciclopedie. - M.: Marea Enciclopedie Rusă.
Redactor-șef G.P. Svișciov.
1994.
Dicţionar- o listă de cuvinte aranjate alfabetic sau tematic, prelucrate lexicografic.
Un dicționar este un produs lexicografic care conține o listă ordonată de unități lingvistice (cuvinte, fraze etc.) cu caracteristicile lor scurte sau caracteristicile conceptelor pe care le denotă, sau cu o traducere în altă limbă.
Mașină, mașină, mașină(din greacă Αὐτός - „însuși” și latinescul Mobilis - „cel care se mișcă”) - un vehicul cu roți autopropulsat care este condus de un motor instalat pe el și este destinat transportului de persoane, mărfuri, remorcare Vehicul, executând lucrări speciale și transportând utilaje speciale pe drumuri fără șine. Se deplasează în principal pe uscat.

Auto- un sistem complex, un set de mecanisme și componente care pot eșua. Prin urmare, mașinile necesită întreținere regulată. Citiți: Cum să urmăriți o mașină?
![]() Mitsubishi Motors Corporation(Japoneză: 三菱自動車工業株式会社 Mitsubishi Jidōsha Kōgyō Kabushiki Kaisha) (MMC) este o companie de automobile japoneză, parte a Mitsubishi- Cel mai mare grup de producție din Japonia. Sediul central este la Tokyo. În 1970, Mitsubishi Motors a fost format din Mitsubishi Industriile Grele.
Mitsubishi Motors Corporation(Japoneză: 三菱自動車工業株式会社 Mitsubishi Jidōsha Kōgyō Kabushiki Kaisha) (MMC) este o companie de automobile japoneză, parte a Mitsubishi- Cel mai mare grup de producție din Japonia. Sediul central este la Tokyo. În 1970, Mitsubishi Motors a fost format din Mitsubishi Industriile Grele.
Sisteme de control pentru parametrii finali ai traiectoriei aeronavei (împingerea și raportul componentelor)
Sarcinile principale ale automatizării motoarelor rachete cu propulsie lichidă și compoziția acesteia
Reglarea proceselor și a modurilor de funcționare a motoarelor cu combustibil lichid
Într-un motor de rachetă cu propulsie lichidă, indiferent de sistemul de alimentare cu combustibil, toate operațiunile de întreținere și pregătire pentru lansare, lansarea în sine, ieșirea și funcționarea, oprirea și alte operațiuni sunt efectuate automat, adică. fără intervenție umană (furnizat de un sistem de automatizare).
În automatizarea motoarelor rachete cu combustibil lichid, există trei funcții principale: managementul, reglarea și întreținerea motorului. În primul caz, sistemul de control automat (ACS) asigură executarea oricărei operațiuni, de exemplu, pornirea motorului. Aici, prin pornirea strict secvențială a diferitelor unități și sisteme, motorul este „adus” la un anumit mod de funcționare. În cel de-al doilea caz, sistemul de control automat (ACS) asigură întreținerea și modificarea conform unui program dat a oricărui parametru, de exemplu, valoarea de forță. În cele din urmă, în al treilea caz, sistemul de automatizare trebuie să asigure întreținerea motorului, de exemplu, înainte de pornire, să monitorizeze umplerea componentelor lichide și gazoase, presiunea acestora , poziția și starea diferitelor unități, elemente și sisteme ale motorului și disponibilitatea acestora pentru pornire etc.
Dintre toate aceste funcții de automatizare, sarcinile sale imediate sunt:
1) reglarea și modificarea valorilor de tracțiune și a rapoartelor componentelor;
2) controlul operațiunilor de pornire și oprire;
3) controlul și reglarea funcționării sistemelor de presurizare a rezervoarelor;
4) controlul funcționării sistemului de control al vectorului de tracțiune;
5) asigurarea controlului și gestionării funcționării întregului motor în ansamblu.
Aducerea aeronavei la punctul final al părții active a traiectoriei de zbor balistic cu precizia necesară nu este asigurată de metodele convenționale de control al mișcării centrului de masă al aeronavei. Sub în mod obişnuit Aceasta înseamnă formarea impulsului de tracțiune necesar al motorului rachetă cu combustibil lichid datorită dozării precise a timpului de funcționare a motorului. Se presupune că forța rămâne constantă în timp. Ultima ipoteză pentru motoarele cu combustibil lichid nu este îndeplinită, deoarece atunci când aeronava se deplasează de la nivelul suprafeței pământului la altitudinea de zbor necesară, presiunea și temperatura se schimbă semnificativ. mediu inconjurator. Buclele de control al motorului nu sunt în măsură să compenseze aceste modificări deoarece nu iau în considerare modificările condițiilor de mediu. Pentru a asigura acuratețea necesară a parametrilor de mișcare a aeronavei la sfârșitul părții active a traiectoriei, sunt utilizate sisteme de control speciale pentru a controla parametrii finali ai traiectoriei aeronavei. Parametrii finali ai traiectoriei fazei active de zbor a aeronavelor balistice și a portavionului spațial sunt: viteza aeronavei la sfârşitul fazei active de zbor V la ;masa finală a aeronaveit la Și unghiul de înclinare a axei longitudinale a aeronaveiîn raport cu linia orizontului într-un punct dat de pe suprafaţa Pământului θ la , vezi fig. 6.1.
Orez. 6.1. Formarea parametrilor finali ai traiectoriei aeronavelor balistice
Unghiul de înclinare necesar al axei longitudinale a aeronavei este asigurat de un sistem autonom de control al mișcării în raport cu centrul de masă al aeronavei, folosind un sistem de control vectorial de tracțiune.
Sistem RKS (control aparent al vitezei). Viteza aparentă a aeronavei și sistemele de control al masei finale controlează parametrii motorului pe baza parametrilor de mișcare ai aeronavei.
Măsurarea directă a vitezei de zbor a aeronavei în condiții de densitate variabilă a mediului nu este posibilă. Cu toate acestea, măsurarea accelerației longitudinale aparente creată de forța motorului rachetei este posibilă, de exemplu, folosind un accelerometru. Viteza aeronavei, sigur ca integrală a acceleraţiei longitudinale în timp, numit viteza aparentă. Viteza aparentă este utilizată pentru a asigura viteza finală necesară la sfârșitul fazei active de zbor a aeronavei în sistemul RCS. Schema schematică a acestui sistem este prezentată în Fig. 6.2.

După integrarea semnalului contorului de accelerație aparentă în fiecare moment, devine cunoscută viteza reală a mișcării longitudinale a aeronavei. V fapt.
Informațiile despre viteza reală a aeronavei sunt furnizate elementului de comparație, care conține un program calculat pentru modificarea vitezei V progîn zona de zbor activă a aeronavei. Compararea vitezei calculate și efective furnizate la intrarea elementului de comparație generează un semnal de eroare la ieșirea acestuia ![]()
Orez. 7.2. Schema funcțională a sistemului de control al vitezei (RCS)
După amplificare, semnalul de nepotrivire este convertit de un motor electric reversibil într-o rotație unghiulară a rotorului său. Rotorul motorului electric este conectat la o clapetă care măsoară debitul fluidului de lucru către pompa de turbină din telecomandă. În funcție de semnul nepotrivirii vitezei, clapeta de accelerație fie se deschide, fie se închide cu o sumă corespunzătoare modulului semnalului de nepotrivire. În acest caz, fluxul de combustibil în cameră se modifică și, prin urmare, împingerea motorului din cauza unei modificări a vitezei de rotație a rotorului THA. O modificare a forței motorului duce la o modificare a accelerației aeronavei și, prin urmare, a vitezei aparente. Compararea ulterioară a acesteia cu valoarea vitezei programului vă permite să evaluați acțiunile sistemului și să generați un nou semnal de corecție. Apoi se repetă întregul ciclu de schimb de informații între elementele sistemului. Logica de funcționare a RCS ca orice sistem de control cu feedback se reduce la îndeplinirea condiției ΔV→0. Cu toate acestea, trecerea ciclurilor semnalului sistemului prin elementele sale reale este întotdeauna însoțită de erori atât dinamice, cât și statistice. Drept urmare, este imposibil ca un sistem real să-și copieze cu exactitate programul de calcul. Dacă eroarea totală în urmărirea vitezei efective a programului său de proiectare se află în limite acceptabile (3÷5%), atunci sistemul este considerat adecvat pentru îndeplinirea funcțiilor care îi sunt atribuite. Sistemul RKS își încheie activitatea de îndată ce viteza reală, în limitele abaterilor admise, este egală cu viteza finală a programului V la. În acest moment, sistemul RKS generează o comandă de oprire a motoarelor, care, ocolind bucla de control, este alimentată direct către supapele principale de combustibil, care opresc alimentarea cu combustibil în camera motorului. Ținând cont de impulsul ulterioară și de natura în două etape a opririi, comanda de oprire a motorului poate fi generată puțin mai devreme decât viteza reală este egală cu viteza finală de proiectare.
In timpul functionarii sistemului RCS, datorita adaugarii unor perturbatii exterioare cu erori interne cu aceleasi semne, poate aparea o situatie in care RCS fie tinde sa reduca semnificativ impingerea, fie sa o forteze excesiv. Pentru a evita astfel de situații, sistemul RKS oferă interne Părere cu o cameră printr-un senzor de presiune (PD) în camera motorului, cu ajutorul căruia acțiunea sistemului este limitată numai la zona de abateri permise ale împingerii motorului.
Sistem TSO (sistem de golire a rezervoarelor) Sistemul de control pentru parametrii finali ai traiectoriei aeronavei trebuie sa asigure si masa finala a aeronavei apropiata de cea calculata. La umplerea rezervoarelor cu combustibil, erorile sunt întotdeauna inevitabile: 1) Umplerea insuficientă a combustibilului este în mod fundamental inacceptabilă, deoarece aceasta duce la neîndeplinirea programului de zbor și 2) la umplerea excesivă a combustibilului, reziduurile de combustibil garantate în rezervoare, cauzate de intervenții mecanice și admisie termică insuficientă a combustibilului, trebuie prevăzută la sfârșitul funcționării sistemului de propulsie. Cu toate acestea, influența modificărilor temperaturii combustibilului în zbor (de exemplu, de la încălzirea aerodinamică), accelerarea aeronavei, care provoacă o modificare a raportului componentelor combustibilului, modificări ale caracteristicilor hidraulice ale căilor de combustibil în timpul zborului (de exemplu, modificări ale rezistența căilor de răcire), erorile în unitățile automate de măsurare a combustibilului și alți factori necesită alimentare suplimentară cu combustibil. Soluția simplă aparent evidentă - să turnați combustibil cu o rezervă la pornire și, în momentul opririi motorului, să-l scurgeți peste bordul aeronavei, este în prezent inacceptabilă, deoarece combustibilul de la bordul aeronavei în momentul în care sistemul de propulsie este oprit dobândește prețul încărcăturii utile a aeronavei. O altă soluție evidentă este evaluarea excesului de combustibil la pornire și golirea acestuia în momentul în care aeronava se decolează de pe rampa de lansare, ceea ce este de asemenea inacceptabil, deoarece acest lucru nu garantează situații neprevăzute de posibil consum excesiv de combustibil de către motor în timpul zborului de aeronava și, prin urmare, pune în pericol îndeplinirea misiunii de zbor a aeronavei. O soluție de lucru a problemei se află între cele două soluții extrem de evidente (la prima vedere) de mai sus pentru a asigura că masa finală a aeronavei este apropiată de cea calculată pentru fiecare sistem de propulsie din întreaga serie.
 |
Pe baza acestor prevederi, a fost dezvoltat un sistem de asigurare a masei finale a aeronavei pentru sistemele de propulsie ale aeronavelor balistice și ale portavionului, care se numește sistemul de golire a tancurilor (TSS), vezi Fig. 6.3.
Fig.6.3. Schema funcțională a sistemului de golire a rezervorului
Ca sursă de informații despre preaplinul rezervoarelor de combustibil și evaluarea efectivă a consumului acestuia de către motor, ESS folosește contoare de nivel de combustibil discrete instalate în rezervoarele de control de la distanță. Semnale pentru poziția nivelurilor de combustibil în rezervoare h oȘi HR sunt alimentate la un senzor de nepotrivire de nivel (LMS), cu ajutorul căruia se evaluează diferența lor Δh=h o -h r. Diferența de nivel detectată, după amplificarea și conversia semnalelor în codul mașinii, este trimisă la un computer de bord (ONC), care rezolvă problema a cărui program de golire a rezervorului trebuie implementat în acest moment, în funcție de magnitudinea nepotrivirea nivelului real în rezervoarele de combustibil, cu condiția ca această nepotrivire să fie eliminată până la sfârșitul fazei de zbor active a aeronavei. În această condiție, până la sfârșitul funcționării telecomenzii, resturile de combustibil calculate garantate rămân în rezervoare. Ca rezultat al analizei nepotrivirii nivelului real, computerul de bord generează un semnal de comandă.
După amplificare, acest semnal este convertit de un motor electric reversibil într-o rotație unghiulară a clapetei de accelerație instalată pe una dintre conductele de alimentare cu combustibil către cameră (pe linia de alimentare cu oxidant). Să presupunem că la momentul inițial τ o la început, senzorii de nivel au înregistrat un exces de oxidant Δh o.început(Fig. 6.4). Computerul de bord, ca răspuns la aceste informații, programează un program de golire a rezervorului de oxidant de-a lungul liniei 1. Dacă în următorul interval de timp pentru primirea informațiilor τ 1 Dacă programul propus este urmat, atunci acesta din urmă este păstrat.
 |
Fig.7.4. Principiul de funcționare al sistemului de golire a rezervorului
Dacă în intervalul de timp următor pentru primirea informaţiei τ 2 Dacă este detectată o abatere de la un anumit program, atunci în funcție de starea reală de nepotrivire a nivelului pentru un timp τ 2 este dezvoltat un nou program 2, conform căruia clapeta de accelerație de pe linia de oxidare este mutată într-o nouă poziție. Dacă procesul de golire a rezervoarelor din moment τ 2 lăsat necontrolat, apoi până la sfârșitul operațiunii cu telecomandă se poate termina cu un exces semnificativ de combustibil rămas în rezervorul de combustibil (linia întreruptă 2").
Dacă în intervalul de timp τ 3 Când computerul de bord primește informații, noul program pentru golirea rezervoarelor 2 este salvat, apoi nu se fac modificări în funcționarea telecomenzii.
Dacă starea actuală de golire a rezervorului nu urmează programul intenționat, atunci programul de golire a rezervorului de combustibil se modifică flexibil și reprezintă o sumă finită de programe (vezi calea întreruptă în Fig. 6.4).
Ca urmare a muncii SSB, sunt implementate principiile pentru rezolvarea problemei asigurării masei finale a unei aeronave, formulate mai sus.
Caracteristica principală a sistemului de control al greutății finite a aeronavei luate în considerare este că excesul de combustibil este „scurcat” din rezervoare prin camera motorului, ca urmare a modificării raportului dintre componentele combustibilului din acesta. Desigur, această împrejurare nu contribuie la menținerea strictă a valorii optime a raportului componentelor combustibilului corespunzător impulsului specific maxim al forței motorului. De asemenea, din teoria generală a motoarelor se știe că în regiunea extremului forței specifice a unui motor rachetă, relația sa cu raportul componentelor combustibilului este blândă. Prin urmare, fără prea multă deteriorare a impulsului de împingere specific, este posibil să se schimbe raportul componentelor combustibilului cu 3 ÷ 5% din valoarea sa optimă.
Stabilizarea poziției axelor aeronavei în spațiu și unghi θ laîn timpul fazei finale a zborului activ al aeronavei sunt asigurate de un sistem de control vectorial de tracțiune.
Volane pe gaz(Fig. 6.5, A), din grafit termorezistent, schimbă direcția fluxului de gaz la ieșirea din duza motorului cu ajutorul unui dispozitiv rotativ. Dezavantajul acestei metode este că cârmele instalate în fluxul de gaz la ieșirea din duză creează, în primul rând, rezistență constantă la fluxul de gaz. . În plus, în timpul funcționării motorului, în al doilea rând, suprafața cârmelor cu gaz arde la aproximativ jumătate din dimensiunea inițială.
Acest dezavantaj poate fi evitat prin instalarea cârmelor periferice la ieșirea duzei (Fig. 6.5, b), care controlează vectorul de tracțiune prin scufundarea suprafeței de protecție a volanului în fluxul de gaz la ieșirea din duza motorului. În poziție neutră, cârmele periferice nu creează rezistență la fluxul de gaz.
Rotiți camera sau duza.În loc să rotiți camera, numai duza motorului poate fi rotită (Fig. 6.5, V) sau un deflector toroidal instalat la ieșirea duzei (Fig. 6.5, G), sau rotirea duzei cu o tăietură oblică (Fig. 6.5, d).
 |
Orez. 6.5. Metode posibile de control al vectorului de tracțiune al unui motor de rachetă
Injecție de gaz în partea supercritică a duzei. Deosebit de remarcată este metoda de schimbare a vectorului de împingere prin suflarea de lichid sau gaz în partea supercritică a duzei (Fig. 6.5, e). Lichidul (sau gazul) este plasat într-un cilindru 1 și, la comanda sistemului de comandă, prin supapele 2, intră cu o ușoară presiune în exces în porțiunea de expansiune a duzei 3 în unghi. α. În apropierea peretelui duzei, la limita fluxului supersonic și a fazei de vapori a lichidului 4 (sau gazului), se realizează o undă de șoc 5. În spatele undei de șoc se formează o regiune de presiune crescută (în Fig. 6.5, e programa Р с =f(l c)), în care jetul de gaz este deviat spre axa duzei, ceea ce determină o deviație a întregului flux de gaz și astfel creează o excentricitate a împingerii duzei în direcția opusă devierii fluxului de gaz. Când se injectează 1% din debitul de lichid în raport cu debitul total de gaz prin duză, apare o componentă transversală a forței egală cu 0,5% din forța longitudinală totală a motorului. Astfel, injectarea de gaz sau lichid în partea supercritică a duzei este utilizată pentru controlul precis (de precizie) al vectorului de împingere.
O altă metodă promițătoare este controlul vectorului de tracțiune prin redistribuirea consumului de combustibil între camerele atașate rigid de aeronava într-un sistem de propulsie cu mai multe camere. Cu toate acestea, utilizarea pe scară largă a acestei metode este împiedicată de dificultățile tehnice de implementare a reglementărilor pentru redistribuirea consumului de combustibil, menținând simultan raportul componentelor combustibilului, organizând interacțiunea acestora cu sistemele RKS și SOB și limitând simultan profunzimea schimbării în modurile de funcționare ale camerelor motoarelor.